
FCOS: Fully Convolutional One-Stage Object Detection
Load PASCAL VOC 2007 data
Assignment use the PASCAL VOC 2007 dataset, VOC comprises annotated bounding boxes for 20 object classes: ["aeroplane", "bicycle", "bird", "boat", "bottle", "bus", "car", "cat", "chair", "cow", "diningtable", "dog", "horse", "motorbike", "person", "pottedplant", "sheep", "sofa", "train", "tvmonitor"].
Dataset sizes: train (2501), val (2510)
取 batch_size = 16, 从 dataloader 中读取一个batch有
train_loader_iter = iter(train_loader)
image_paths, images, gt_boxes = next(train_loader_iter)image batch has shape : torch.Size([16, 3, 224, 224])
gt_boxes has shape : torch.Size([16, 40, 5])
其中第一个输出是shape为(B, 3, IMAGE_SHAPE[0], IMAGE_SHAPE[1])的图像张量, 和在CIFAR-10中的加载类似。
第二个输出是shape为(B, N, 5)的gt_boxes,是关于batch中所有图像其中所有物体的信息。gt_boxes[i, j] = (x1, y1, x2, y2, C)提供关于image[i]中的第j个对象的信息。框的左上角是(x1, y1),右下角是(x2, y2),这些坐标是是在[0, 224]区间的实数值。C是一个表示这个边界框的类别标签。
每张图像可以有不同数量的框,image[i]有个框,如果标注对象少于个,则只有gt_boxes[i]的前行包含注释;剩余的行用 -1 填充
如例:表示在图中有3个框,其余均用-1填充
print(gt_boxes[1, :5, :])
tensor([[[ 87.8427, 111.7013, 99.1920, 137.3867, 14.0000],
[107.5547, 108.7147, 126.6693, 154.7093, 14.0000],
[123.6827, 112.2987, 139.2133, 154.7093, 14.0000],
[ -1.0000, -1.0000, -1.0000, -1.0000, -1.0000],
[ -1.0000, -1.0000, -1.0000, -1.0000, -1.0000]]])
Implementing FCOS
An overview of the model in shown below. In case it does not load, see Figure 2 in FCOS paper.
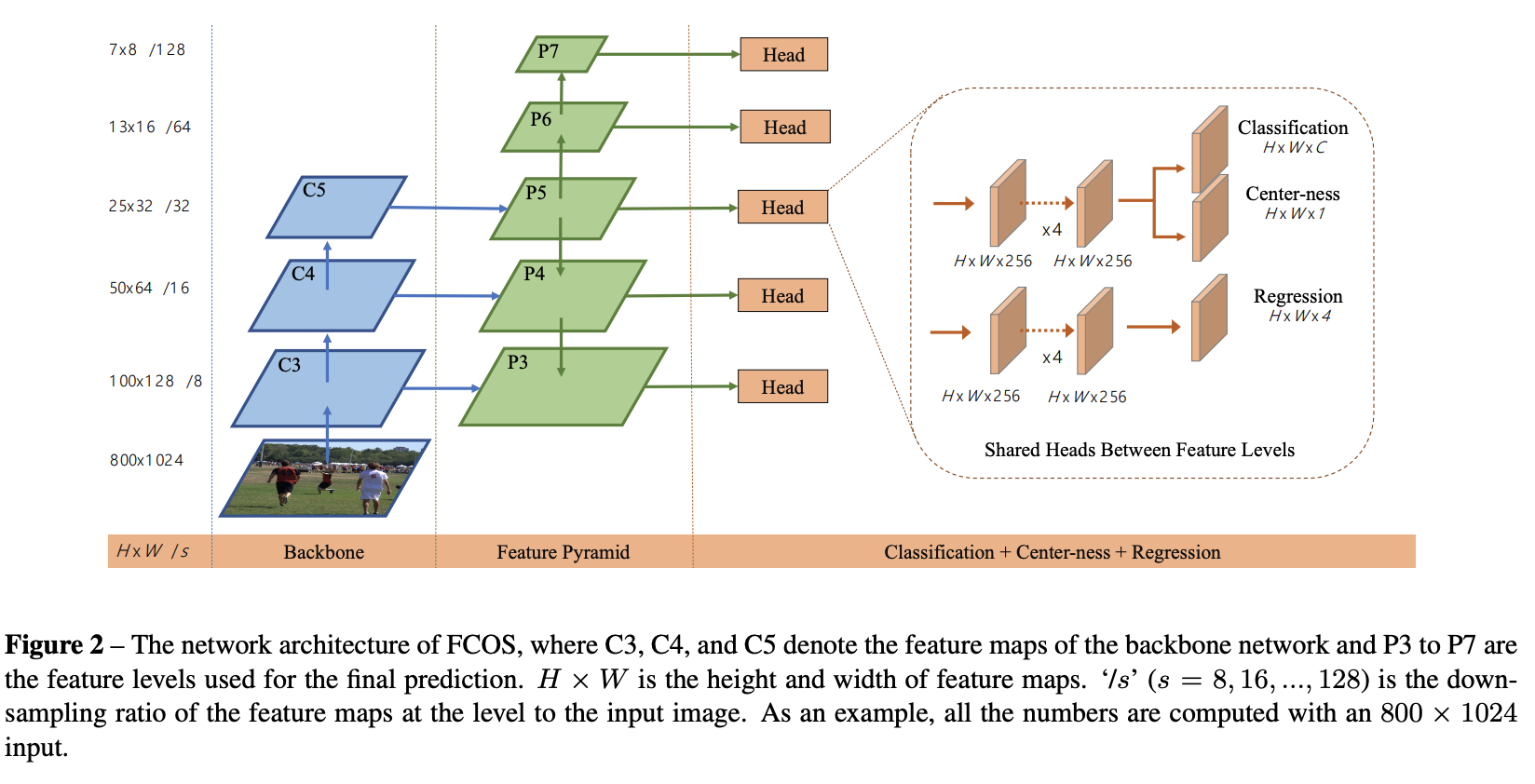
CAUTION: 原论文是将中心度预测器(Centerness)和分类预测器(Classification)并行,这里在实现的是使用中心度预测器(Centerness)和框回归预测(box Regression)
Implementing Backbone and Feature Pyramid Network
首先构建 backbone(骨干网络) 和 FPN(特征金字塔)如图示中蓝色部分和绿色部分
具体使用 RegNetX-400MF 从预训练的ImageNet权重初始化这个backbone,提取中间特征(c3, c4, c5),这些特征(c3, c4, c5)的高度和宽度分别是输入图像的
这些值(8, 16, 32)被称为这些特征的 “stride”
For dummy input images with shape: (2, 3, 224, 224)
Shape of c3 features: torch.Size([2, 64, 28, 28])
Shape of c4 features: torch.Size([2, 160, 14, 14])
Shape of c5 features: torch.Size([2, 400, 7, 7])实现FPN提取三个特征 class DetectorBackboneWithFPN(nn.Module)
具体思路:(为了方便训练这里仅使用提取出的3个特征)
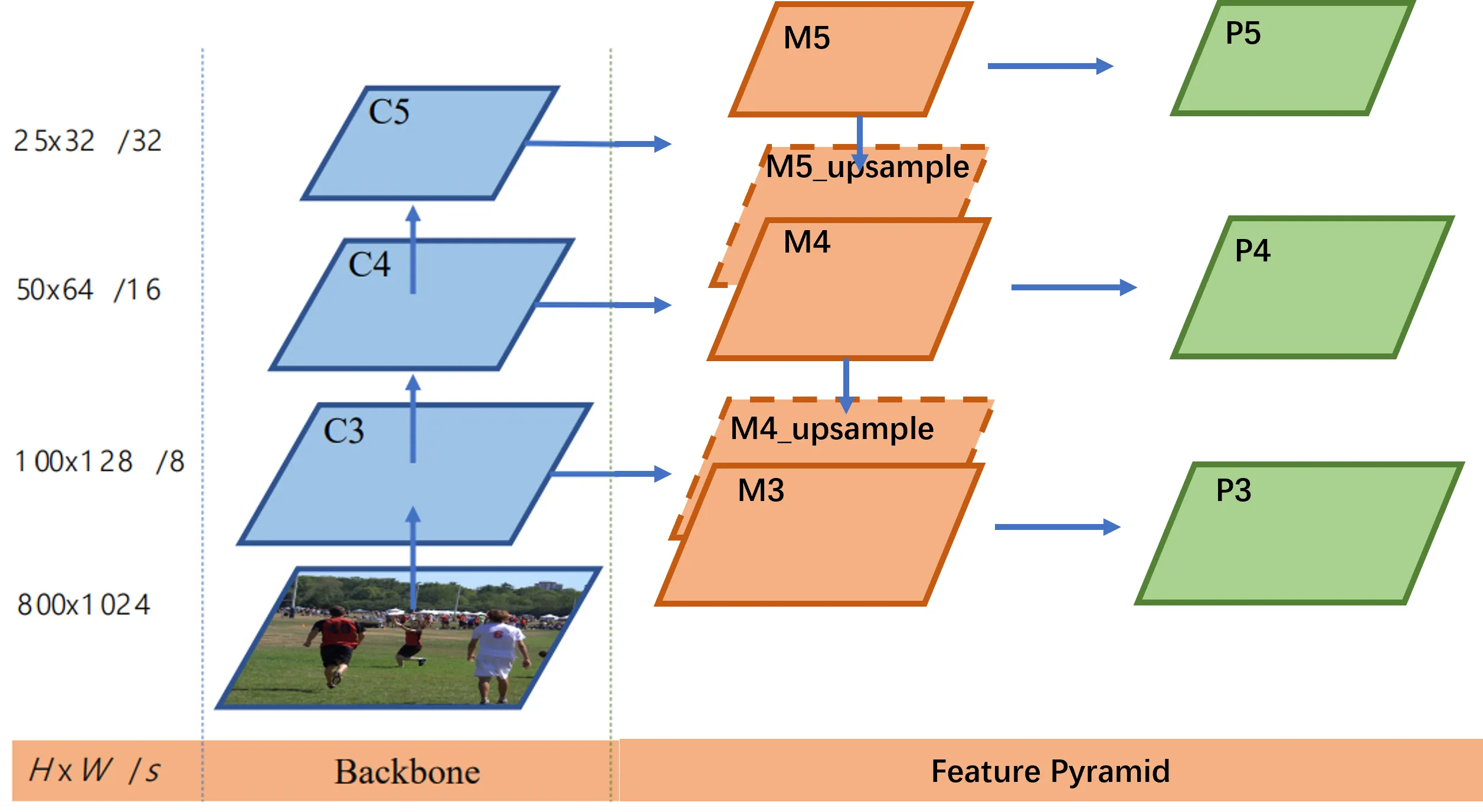
通过backbone提取出的3个特征经过kernel_size = 1, stride=1的统一通道数,然后在从特征图大小最小的c5开始进行上采样到和c4特征图大小相同,相加融合之后得到m4, 对m4再进行上采样到和c3大小相同,相加融合得到m3
在对m3, m4, m5进行kernel_size = 3, stride=1, padding=1的卷积(特征图大小不变),输出p3, p4, p5
class DetectorBackboneWithFPN(nn.Module):
def __init__(self, out_channels: int):
self.fpn_params = nn.ModuleDict({
"m3": nn.Conv2d(in_channels=dummy_out_shapes[0][1][1], out_channels=out_channels, kernel_size=1, stride=1),
"m4": nn.Conv2d(in_channels=dummy_out_shapes[1][1][1], out_channels=out_channels, kernel_size=1, stride=1),
"m5": nn.Conv2d(in_channels=dummy_out_shapes[2][1][1], out_channels=out_channels, kernel_size=1, stride=1),
"p3": nn.Conv2d(in_channels=out_channels, out_channels=out_channels, kernel_size=3, stride=1, padding=1),
"p4": nn.Conv2d(in_channels=out_channels, out_channels=out_channels, kernel_size=3, stride=1, padding=1),
"p5": nn.Conv2d(in_channels=out_channels, out_channels=out_channels, kernel_size=3, stride=1, padding=1),
})
def forward(self, images: torch.Tensor):
m3 = self.fpn_params["m3"](backbone_feats["c3"])
m4 = self.fpn_params["m4"](backbone_feats["c4"])
m5 = self.fpn_params["m5"](backbone_feats["c5"])
m5_upsample = F.interpolate(m5, size=(m4.shape[2], m4.shape[3]), mode="nearest")
m4 = m4 + m5_upsample
m4_upsample = F.interpolate(m4, size=(m3.shape[2], m3.shape[3]), mode="nearest")
m3 = m3 + m4_upsample
fpn_feats["p3"] = self.fpn_params["p3"](m3)
fpn_feats["p4"] = self.fpn_params["p4"](m4)
fpn_feats["p5"] = self.fpn_params["p5"](m5)
return fpn_featsImplementing FCOS prediction network (head)
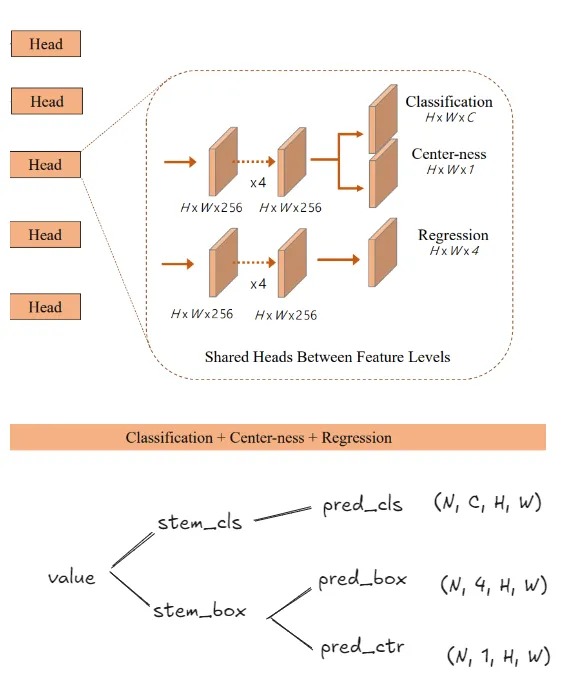
实现头部预测块(原论文中的橙色块),其内部含有4个卷积层(对应代码中stem_channels的长度为4),输出(H, W, 256)大小的特征(不同FPN层级的H, W不同)然后每个卷积层使用一个卷积层进行最终预测
在预期输出中,classification logits 有 NUM_CLASSES 个通道,box regression deltas 有 4 个输出通道,centerness 有 1 个输出通道。 所有输出的高度和宽度被展平为一个维度,从而得到 (B, H * W, C) 格式 - 这种格式更方便计算损失.
class FCOSPredictionNetwork(nn.Module):
"""
FCOS prediction network that accepts FPN feature maps from different levels
and makes three predictions at every location: bounding boxes, class ID and
centerness. This module contains a "stem" of convolution layers, along with
one final layer per prediction. For a visual depiction, see Figure 2 (right
side) in FCOS paper: https://arxiv.org/abs/1904.01355
We will use feature maps from FPN levels (P3, P4, P5) and exclude (P6, P7).
"""
def __init__(
self, num_classes: int, in_channels: int, stem_channels: List[int]
):
"""
Args:
num_classes: Number of object classes for classification.
in_channels: Number of channels in input feature maps. This value
is same as the output channels of FPN, since the head directly
operates on them.
stem_channels: List of integers giving the number of output channels
in each convolution layer of stem layers.
"""
super().__init__()
# Fill these.
stem_cls = []
stem_box = []
# Replace "pass" statement with your code
prev_out = in_channels
for output_channel in stem_channels:
conv_cls = nn.Conv2d(in_channels=prev_out, out_channels=output_channel, kernel_size=3, stride=1, padding=1)
nn.init.normal_(conv_cls.weight.data, mean=0, std=0.01)
nn.init.constant_(conv_cls.bias.data, 0)
stem_cls.append(conv_cls)
stem_cls.append(nn.ReLU())
conv_box = nn.Conv2d(in_channels=prev_out, out_channels=output_channel, kernel_size=3, stride=1, padding=1)
nn.init.normal_(conv_box.weight.data, mean=0, std=0.01)
nn.init.constant_(conv_box.bias.data, 0)
stem_box.append(conv_box)
stem_box.append(nn.ReLU())
prev_out = output_channel
self.stem_cls = nn.Sequential(*stem_cls)
self.stem_box = nn.Sequential(*stem_box)
self.pred_cls = None # Class prediction conv
self.pred_box = None # Box regression conv
self.pred_ctr = None # Centerness conv
# Replace "pass" statement with your code
self.pred_cls = nn.Conv2d(in_channels=prev_out, out_channels=num_classes, kernel_size=3, stride=1, padding=1)
self.pred_box = nn.Conv2d(in_channels=prev_out, out_channels=4, kernel_size=3, stride=1, padding=1)
self.pred_ctr = nn.Conv2d(in_channels=prev_out, out_channels=1, kernel_size=3, stride=1, padding=1)
for layer in [self.pred_cls, self.pred_box, self.pred_ctr]:
nn.init.normal_(layer.weight.data, mean=0, std=0.01)
nn.init.constant_(layer.bias.data, 0)
# OVERRIDE: Use a negative bias in `pred_cls` to improve training
# stability. Without this, the training will most likely diverge.
torch.nn.init.constant_(self.pred_cls.bias, -math.log(99))
def forward(self, feats_per_fpn_level: TensorDict) -> List[TensorDict]:
class_logits = {}
boxreg_deltas = {}
centerness_logits = {}
# Replace "pass" statement with your code
for key, value in feats_per_fpn_level.items():
class_logits[key] = self.pred_cls(self.stem_cls(value)) # (N, C, H, W)
N, C, H, W = class_logits[key].shape
class_logits[key] = class_logits[key].reshape(N, C, -1)
class_logits[key] = class_logits[key].permute(0, 2, 1)
boxreg_deltas[key] = self.pred_box(self.stem_box(value)) # (N, 4, H, W)
boxreg_deltas[key] = boxreg_deltas[key].reshape(N, 4, -1)
boxreg_deltas[key] = boxreg_deltas[key].permute(0, 2, 1)
centerness_logits[key] = self.pred_ctr(self.stem_box(value)) # (N, 1, H, W)
centerness_logits[key] = centerness_logits[key].reshape(N, 1, -1)
centerness_logits[key] = centerness_logits[key].permute(0, 2, 1)
return [class_logits, boxreg_deltas, centerness_logits]
Train FCOS
目标检测和图像分类的不同之处在于:
- 每张图像有可变数量的边界框(和他们对应的类别标签)
- 类别标签不是和整个图像相关联,而是仅和边界框包围的一个小区域相关
Assigning a GT target to every model prediction
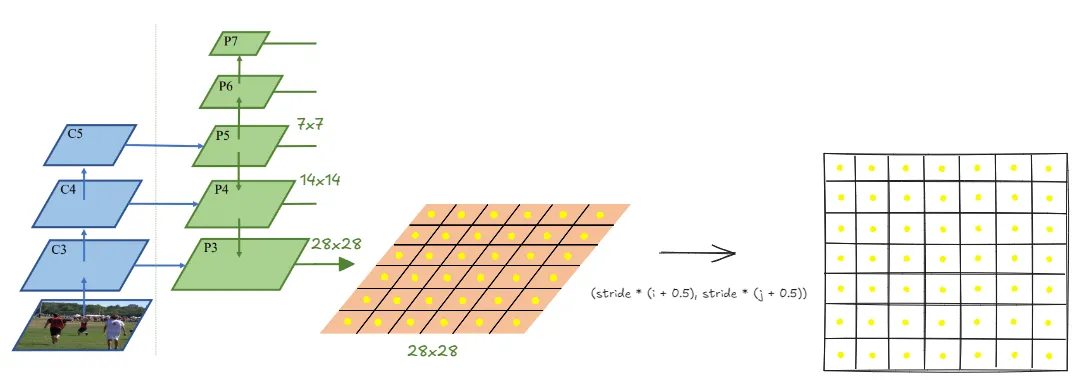
首先根据每层特征图生成location(特征图中心点),由于特征图是在原图的基础上缩小了,需要将这些中心点的坐标放大回原图的坐标系中去
def get_fpn_location_coords(
shape_per_fpn_level: Dict[str, Tuple],
strides_per_fpn_level: Dict[str, int],
dtype: torch.dtype = torch.float32,
device: str = "cpu",
) -> Dict[str, torch.Tensor]:
location_coords = {
level_name: None for level_name, _ in shape_per_fpn_level.items()
}
for level_name, feat_shape in shape_per_fpn_level.items():
level_stride = strides_per_fpn_level[level_name]
N, C, H, W = feat_shape
rows = torch.arange(start=0, end=H, dtype=dtype, device=device)
cols = torch.arange(start=0, end=W, dtype=dtype, device=device)
y_grid, x_grid = torch.meshgrid(rows, cols, indexing="ij")
xc = level_stride * (x_grid + 0.5)
yc = level_stride * (y_grid + 0.5)
stack_location_coords = torch.stack([xc, yc], dim=-1)
location_coords[level_name] = stack_location_coords.reshape(-1, 2)
return location_coordsNOTE:“feature map location” 和 “feature center”表示相同的意思,就是对特征图划分成网格后取中心点(图中的黄点)
Matching feature map locations with GT boxes
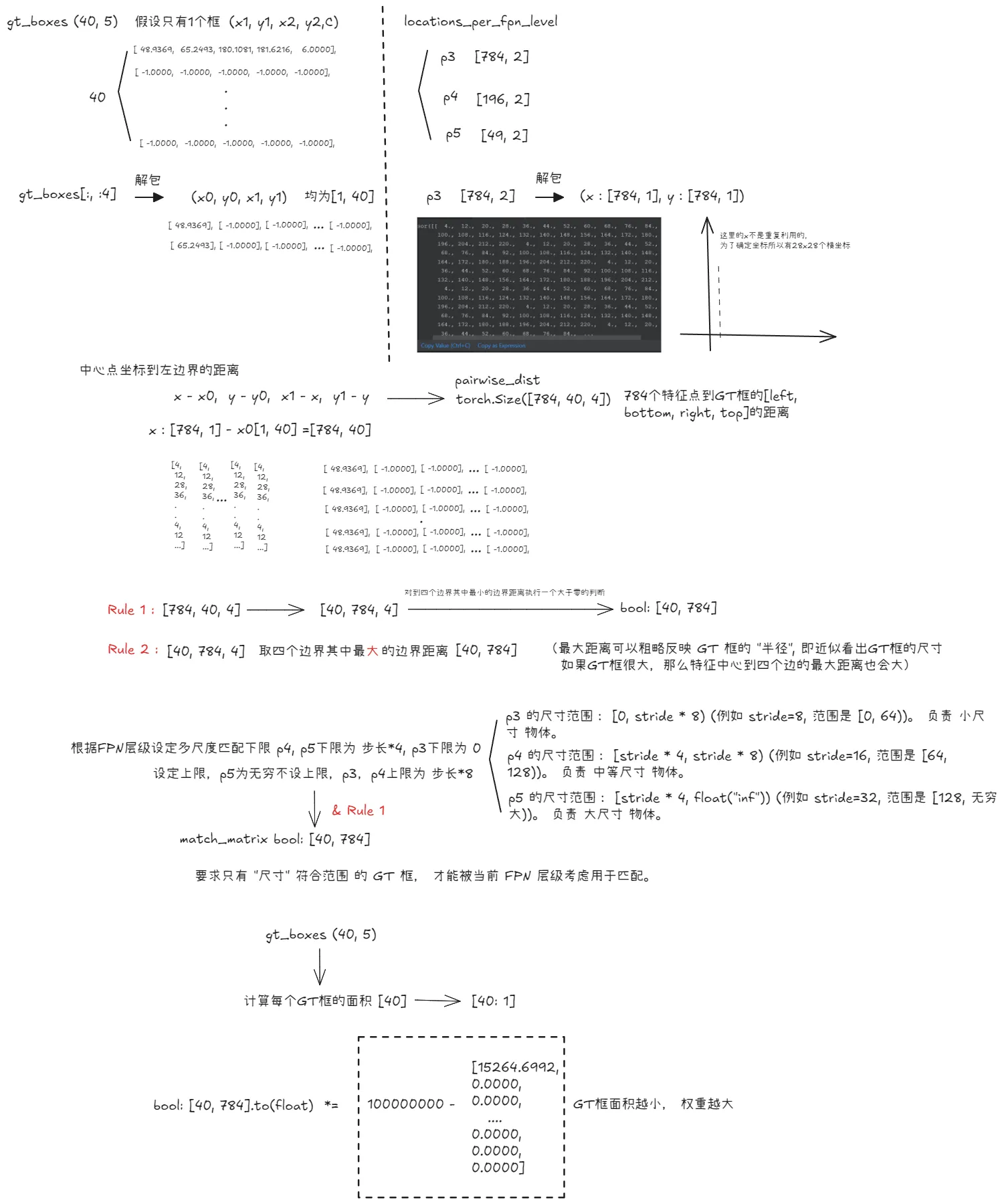
在将特征图中心点映射到原图坐标系中去之后,需要进行确定中心点匹配哪些真实标注的GT框,参考论文使用两种匹配规则:
Rule 1: 取中心点到4个GT框的边界距离的最小值,如果存在小于0,则不匹配
Rule 2: 根据FPN层级,设定多匹配规则:
p4, p5的下限为stride * 4,p3的下限为0
p3, p4的上限为stride * 8,p5为无穷不设置上限
def fcos_match_locations_to_gt(
locations_per_fpn_level: TensorDict,
strides_per_fpn_level: Dict[str, int],
gt_boxes: torch.Tensor,
) -> TensorDict:
matched_gt_boxes = {
level_name: None for level_name in locations_per_fpn_level.keys()
}
# Do this matching individually per FPN level.
for level_name, centers in locations_per_fpn_level.items():
# Get stride for this FPN level.
stride = strides_per_fpn_level[level_name]
x, y = centers.unsqueeze(dim=2).unbind(dim=1)
x0, y0, x1, y1 = gt_boxes[:, :4].unsqueeze(dim=0).unbind(dim=2)
pairwise_dist = torch.stack([x - x0, y - y0, x1 - x, y1 - y], dim=2)
# Pairwise distance between every feature center and GT box edges:
# shape: (num_gt_boxes, num_centers_this_level, 4)
pairwise_dist = pairwise_dist.permute(1, 0, 2)
# The original FCOS anchor matching rule: anchor point must be inside GT.
match_matrix = pairwise_dist.min(dim=2).values > 0
# Multilevel anchor matching in FCOS: each anchor is only responsible
# for certain scale range.
# Decide upper and lower bounds of limiting targets.
pairwise_dist = pairwise_dist.max(dim=2).values
lower_bound = stride * 4 if level_name != "p3" else 0
upper_bound = stride * 8 if level_name != "p5" else float("inf")
match_matrix &= (pairwise_dist > lower_bound) & (
pairwise_dist < upper_bound
)
# Match the GT box with minimum area, if there are multiple GT matches.
gt_areas = (gt_boxes[:, 2] - gt_boxes[:, 0]) * (
gt_boxes[:, 3] - gt_boxes[:, 1]
)
# Get matches and their labels using match quality matrix.
match_matrix = match_matrix.to(torch.float32)
match_matrix *= 1e8 - gt_areas[:, None]
# Find matched ground-truth instance per anchor (un-matched = -1).
match_quality, matched_idxs = match_matrix.max(dim=0)
matched_idxs[match_quality < 1e-5] = -1
# Anchors with label 0 are treated as background.
matched_boxes_this_level = gt_boxes[matched_idxs.clip(min=0)]
matched_boxes_this_level[matched_idxs < 0, :] = -1
matched_gt_boxes[level_name] = matched_boxes_this_level
return matched_gt_boxesGT Targets for box regression
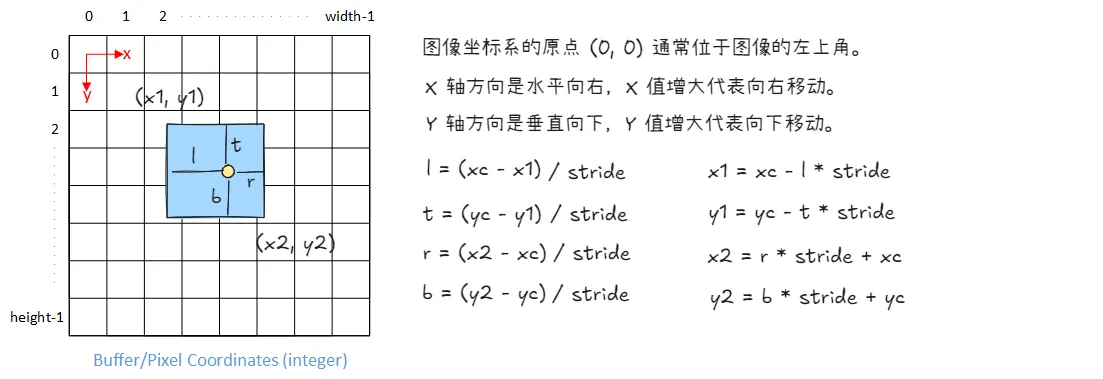
预测框可以看做是预测四个值, 即从特征位置(中心点)到框边缘(红色框)的距离(左L, 上T, 右R, 下B)
目前,所有位置和GT框都用图像的坐标表示,对于VOC的图像范围是(0, 224),对于其他数据集范围可以更大
显然不能使用这种坐标格式,如此大的值会导致梯度爆炸,所以需要将LTRB安装FPN层级的步长进行归一化。
假设 FPN 层级为p3(stride = 8),位置为(xc, yc),匹配的GT框坐标为(x1, y1, x2, y2),则ltrb为
l = (xc - x1) / stride t = (yc - y1) / stride
r = (x2 - xc) / stride b = (y2 - yc) / stride也称为delta值,在训练时预测这些值,在推理时需要应用逆变换,来转为原图坐标系中的预测框
坐标系转delta值:
def fcos_get_deltas_from_locations(
locations: torch.Tensor, gt_boxes: torch.Tensor, stride: int
) -> torch.Tensor:
deltas = torch.empty(size=(gt_boxes.shape[0], 4)).to(device=gt_boxes.device)
deltas[:, 0] = locations[:, 0] - gt_boxes[:, 0] # l = (xc - x1)
deltas[:, 1] = locations[:, 1] - gt_boxes[:, 1] # t = (yc - y1)
deltas[:, 2] = gt_boxes[:, 2] - locations[:, 0] # r = (x2 - xc)
deltas[:, 3] = gt_boxes[:, 3] - locations[:, 1] # b = (y2 - yc)
deltas /= stride
deltas[gt_boxes[:, :4].sum(dim=1) == -4] = -1
return deltas
def fcos_apply_deltas_to_locations(
deltas: torch.Tensor, locations: torch.Tensor, stride: int
) -> torch.Tensor:
output_boxes = torch.empty_like(deltas)
deltas = torch.clip(deltas, min=0)
output_boxes[:, 0] = locations[:, 0] - deltas[:, 0] * stride # xc - l * stride
output_boxes[:, 1] = locations[:, 1] - deltas[:, 1] * stride # yc - t * stride
output_boxes[:, 2] = locations[:, 0] + deltas[:, 2] * stride # xc + r * stride
output_boxes[:, 3] = locations[:, 1] + deltas[:, 3] * stride # yc + b * stride
return output_boxesGT targets for centerness regression
给定一个位置的 GT delta 值 (left, top, right, bottom),FCOS 将中心度定义为:
分子作为特征位置(中心点)到垂直方向和水平方向的边框的距离的最小值,当特征位置越靠近中心时分子越大
分母作为特征位置(中心点)到垂直方向和水平方向的边框的距离的最大值,特征位置越远离GT框中心时分母越大
当 left = right 且 top = bottom 时,此值最大为 1,这意味着特征位置位于 GT 框的中心。 在框的边缘,这些值中的一个将为零,这使得边缘的中心度为零。 中心度回归Head使用这些值作为目标
def fcos_make_centerness_targets(deltas: torch.Tensor):
l_r, t_b = deltas[:, 0::2], deltas[:, 1::2]
centerness = torch.sqrt((torch.min(l_r, dim=1).values * torch.min(t_b, dim=1).values)
/ (torch.max(l_r, dim=1).values * torch.max(t_b, dim=1).values))
centerness[deltas[:, :4].sum(dim=1) == -4] = -1
return centernessLoss Functions
COS 有三个预测目标:
对象分类: FCOS 使用 Focal Loss(Focal Loss 论文链接),是交叉熵损失的扩展,用于处理类别不平衡问题。FCOS 面临类别不平衡问题,因为大多数位置会被分配为“background”。如果处理不当,模型将简单地学习为每个位置预测“background” (注:这里需要把输入编码为one-hot向量)。
框回归: 这里使用简单的 L1 损失 来最小化预测的
LTRBdelta 值和 GTLTRBdelta 值之间的差异。FCOS 使用 Generalized Intersection-over-Union(GIoU 论文链接)损失,在经验上给出了稍微好一点的结果,但速度稍慢 —— 这里使用 L1 损失。中心度回归: 中心度预测值和 GT 目标值都是
[0, 1]范围内的实数值,因此 FCOS 使用 二元交叉熵 (BCE) 损失 对其进行优化。 可以使用 L1 损失,但 BCE 在经验上效果稍好。
import torch
from torchvision.ops import sigmoid_focal_loss
# Sanity check: dummy model predictions for TWO locations, and
# NUM_CLASSES = 5 (typically there are thousands of locations
# across all FPN levels).
# shape: (batch_size, num_locations, num_classes)
dummy_pred_cls_logits = torch.randn(1, 2, 5)
# Corresponding one-hot vectors of GT class labels (2, -1), one
# foreground and one background.
# shape: (batch_size, num_locations, num_classes)
dummy_gt_classes = torch.Tensor([[[0, 0, 1, 0, 0], [0, 0, 0, 0, 0]]])
# This loss expects logits, not probabilities (DO NOT apply sigmoid!)
cls_loss = sigmoid_focal_loss(
inputs=dummy_pred_cls_logits, targets=dummy_gt_classes
)
print("Classification loss (dummy inputs/targets):")
print(cls_loss)
print(f"Total classification loss (un-normalized): {cls_loss.sum()}")Classification loss (dummy inputs/targets):
tensor([[[2.6524e-01, 2.0753e-01, 3.6555e-01, 3.4315e-01, 5.7007e-04],
[5.7676e-03, 2.0160e+00, 1.9218e-01, 7.5354e-01, 7.5142e-02]]])
Total classification loss (un-normalized): 4.224724769592285Pull it all together
回顾整个流程: 首先读取图片,然后经过backbone提取出三个层级p3, p4, p5,然后经过head,做出三类预测,有框预测即box预测,类别预测,中心度预测,然后为了能做出框预测,将不同层级的特征图划分网格取中心点,我们需要确定这些中心点匹配哪些真实的GT框,然后把对应的GT框分配给中心点, 将GT框分配好给中心点之后计算delta值
将匹配的GT框编码成one-hot向量和类别预测计算分类损失(sigmoid_focal_loss) (去掉背景类别)
delta值和框预测计算l1损失 (背景框的损失设为0)
根据delta值计算中心度和中心度预测计算binary_cross_entropy_with_logits损失
class FCOS(nn.Module):
def __init__(
self, num_classes: int, fpn_channels: int, stem_channels: List[int]
):
super().__init__()
self.num_classes = num_classes
self.backbone = DetectorBackboneWithFPN(fpn_channels)
self.pred_net = FCOSPredictionNetwork(num_classes, fpn_channels, stem_channels)
self._normalizer = 150 # per image
def forward(
self,
images: torch.Tensor,
gt_boxes: Optional[torch.Tensor] = None,
test_score_thresh: Optional[float] = None,
test_nms_thresh: Optional[float] = None,
):
pred_cls_logits, pred_boxreg_deltas, pred_ctr_logits = None, None, None
fpn_feats = self.backbone(images)
pred_cls_logits, pred_boxreg_deltas, pred_ctr_logits = self.pred_net(fpn_feats)
fpn_feats_shapes = {
"p3": fpn_feats["p3"].shape,
"p4": fpn_feats["p4"].shape,
"p5": fpn_feats["p5"].shape
}
locations_per_fpn_level = get_fpn_location_coords(fpn_feats_shapes,
self.backbone.fpn_strides, device=images.device)
if not self.training:
return self.inference(
images, locations_per_fpn_level,
pred_cls_logits, pred_boxreg_deltas, pred_ctr_logits,
test_score_thresh=test_score_thresh,
test_nms_thresh=test_nms_thresh,
)
matched_gt_boxes = []
matched_gt_deltas = []
for batch in range(gt_boxes.shape[0]):
matched_gt_boxes_batch = {}
matched_gt_deltas_batch = {}
matched_boxes_per_fpn_level = fcos_match_locations_to_gt(locations_per_fpn_level,
self.backbone.fpn_strides, gt_boxes[batch])
for level_name, matched_boxes in matched_boxes_per_fpn_level.items():
matched_gt_boxes_batch[level_name] = matched_boxes
matched_gt_deltas_batch[level_name] = fcos_get_deltas_from_locations(locations_per_fpn_level[level_name],
matched_boxes, self.backbone.fpn_strides[level_name])
matched_gt_boxes.append(matched_gt_boxes_batch)
matched_gt_deltas.append(matched_gt_deltas_batch)
matched_gt_boxes = default_collate(matched_gt_boxes)
matched_gt_deltas = default_collate(matched_gt_deltas)
matched_gt_boxes = self._cat_across_fpn_levels(matched_gt_boxes)
matched_gt_deltas = self._cat_across_fpn_levels(matched_gt_deltas)
pred_cls_logits = self._cat_across_fpn_levels(pred_cls_logits)
pred_boxreg_deltas = self._cat_across_fpn_levels(pred_boxreg_deltas)
pred_ctr_logits = self._cat_across_fpn_levels(pred_ctr_logits)
num_pos_locations = (matched_gt_boxes[:, :, 4] != -1).sum()
pos_loc_per_image = num_pos_locations.item() / images.shape[0]
self._normalizer = 0.9 * self._normalizer + 0.1 * pos_loc_per_image
loss_cls, loss_box, loss_ctr = None, None, None
matched_gt_classes = F.one_hot((matched_gt_boxes[:, :, 4] + 1).to(dtype=int), num_classes=21)[:, :, 1:].to(device=matched_gt_boxes.device, dtype=matched_gt_boxes.dtype)
# 计算分类损失
loss_cls = sigmoid_focal_loss(pred_cls_logits, matched_gt_classes)
# 计算框回归损失
loss_box = 0.25 * F.l1_loss(pred_boxreg_deltas, matched_gt_deltas, reduction="none")
# 背景框设置为0
loss_box[matched_gt_deltas < 0] *= 0.0
# 初始化 (B*L,) 的全零 Tensor
matched_gt_ctr = torch.zeros(B*L).to(device=matched_gt_boxes.device, dtype=matched_gt_boxes.dtype)
# flatten
pred_ctr_logits = pred_ctr_logits.view(-1)
matched_gt_deltas = matched_gt_deltas.view(-1, 4)
# 计算GT中心度目标值
matched_gt_ctr = fcos_make_centerness_targets(matched_gt_deltas)
# 中心度损失
loss_ctr = F.binary_cross_entropy_with_logits(pred_ctr_logits, matched_gt_ctr, reduction="none")
loss_ctr[matched_gt_ctr < 0] *= 0.0
return {
"loss_cls": loss_cls.sum() / (self._normalizer * images.shape[0]),
"loss_box": loss_box.sum() / (self._normalizer * images.shape[0]),
"loss_ctr": loss_ctr.sum() / (self._normalizer * images.shape[0]),
}Non-maximum suppression
在目标检测任务中,模型通常会由于下面的原因对图像中的 同一个物体 预测出 多个 bounding boxes (边界框)。
- 滑动窗口或 Anchor-based 方法: 像 Faster R-CNN 和 YOLOv1 (以及 FCOS 的 anchor point 的概念虽然不同,但本质上也有类似的地方) 这样的检测器,会在图像上生成 大量的候选框 (proposals 或 anchors), 并对这些候选框进行预测。 即使对于同一个物体,也可能有 多个候选框都 “检测” 到了它。
- 特征图位置点的预测: 像 FCOS 这样的 Anchor-Free 检测器, 特征图上的 多个位置点 可能都会 预测到同一个物体。 因为一个物体的中心区域附近的位置点都可能被认为是正样本,并且预测出包含该物体的边界框。
- 冗余检测: 因此,模型输出的原始检测结果中,往往会包含 大量重叠的、指向同一个物体的 bounding boxes。 这些 冗余的检测框会降低检测结果的准确性和可读性。
NMS 的作用就是: 消除这些冗余的、重叠的 bounding boxes, 只保留最 “好” 的那些框, 从而得到更简洁、更准确的检测结果。
如果有多个框检测到同一个物体,为什么不简单地只保留**置信度(score)**最高的那个?
A:
- 如果图像中不单单只包含一个物体,而是多个不同类别的物体,只保留置信度最高的框,其他物体就会被删除.
- 即使图像中都是同一种物体,也可能存在多个实例。 例如,图像中有多个人,如果只取最高分的框,那么 只能检测到一个 “person”,而忽略了其他人。
- 置信度分数只是模型对预测框的 confidence 估计, 分数最高的框不一定就是唯一正确或者最佳的框。 可能有其他框,虽然分数略低,但与真实物体的位置更精确,或者与其他高分框代表不同的物体。 直接丢弃其他框会损失潜在的有效检测结果。
NMS 不仅考虑置信度,还考虑了 bounding boxes 之间的重叠程度 (Intersection over Union, IoU)。 NMS 的目标是在保留高置信度框的同时, 消除那些与高置信度框过度重叠的冗余框,从而尽可能地保留对不同物体的检测结果。
def nms(boxes: torch.Tensor, scores: torch.Tensor, iou_threshold: float = 0.5):
if (not boxes.numel()) or (not scores.numel()):
return torch.zeros(0, dtype=torch.long)
keep = []
x1, y1, x2, y2 = boxes[:, :4].unbind(dim=1)
area = torch.mul(x2 - x1, y2 - y1)
# 对得分进行排序,并获取排序后的索引(升序)
_, index = scores.sort(0)
count = 0
# 只要index中还有未处理的框, 就继续循环 - index.numel() 返回 `index` 中 Tensor 的总数
while index.numel() > 0:
# 获取当前index中最后一个索引 (得分最高)
largest_idx = index[-1]
keep.append(largest_idx)
count += 1
# 移除得分最高的
index = index[:-1]
if index.size(0) == 0:
break
# get the x1,y1,x2,y2 of all the remaining boxes, and clamp them so that
# we get the coord of intersection of boxes and highest-scoring box
# 计算最高分框和每个剩余框的交集矩形坐标,如果没有交集就会变为负数,需要处理
x1_inter = torch.index_select(x1, 0, index).clamp(min=x1[largest_idx])
y1_inter = torch.index_select(y1, 0, index).clamp(min=y1[largest_idx])
x2_inter = torch.index_select(x2, 0, index).clamp(max=x2[largest_idx])
y2_inter = torch.index_select(y2, 0, index).clamp(max=y2[largest_idx])
# 计算面积
W_inter = (x2_inter - x1_inter).clamp(min=0.0)
H_inter = (y2_inter - y1_inter).clamp(min=0.0)
inter_area = W_inter * H_inter
# 计算并集区域的面积 area - 并集区域面积 | union - 框A面积 + 框B面积 - 交集面积
areas = torch.index_select(area, 0, index)
union_area = (areas - inter_area) + area[largest_idx]
# IoU 判断哪些元素小于等于iou_threshold
IoU = inter_area / union_area
index = index[IoU.le(iou_threshold)]
keep = torch.Tensor(keep).to(device=scores.device).long()
return keep