
Faster R-CNN: A Classic Two-Stage Anchor-Based Object Detector
Faster R-CNN first stage: Region Proposal Network (RPN)
Faster R-CNN 分为两个阶段,第一阶段是 RPN,用来生成 “区域提议”(Region Proposals),即图像中可能包含物体的区域,然后将这些区域交给第二阶段进行更精确的物体识别和定位
输入图像先通过一个backbone进行特征提取,得到FPN(特征金字塔网络)的特征图(p3, p4, p5),RPN在 FPN 特征图的每个位置进行预测。
Faster R-CNN是“基于锚框”的方法,意味着在FPN特征图的每个位置都预先定义了一组固定大小和比例的矩形框,即锚框,模型针对每个锚框在每个FPN位置预测两个信息:
- Objectness(物体性):预测该锚框内包含任何物体的可能性,判断锚框内是“前景”(包含物体)还是“背景”,注意是类别无关的,只判断有没有物体,不关心具体是什么
- Box regression deltas (边界框回归偏移量),用于将锚框调整成更精确,和真实物体更接近的框,锚框只是预设的,需要通过这些偏移量进行微调才能发挥更好的效果。通常,框回归需要预测 4 个偏移量: 中心点 x 坐标的偏移量 (
dx), 中心点 y 坐标的偏移量 (dy), 框的宽度缩放比例 (dw), 框的高度缩放比例 (dh)。
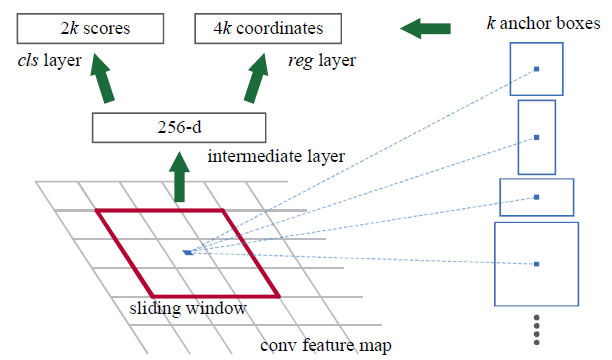
如图在FPN特征图的每个中心点(位置),模型会预测锚框的Objectness(物体性得分)和Box regression deltas(边界框回归偏移量)
NOTE这里使用的是更常见的预测
k个logits(未经过sigmoid或softmax的值),然后使用logistic regressor(如sigmoid)来得到物体性概率,而不像图中预测2k个scores使用2-way softmax,这样可以减少参数量
从概念上看RPN和FCOS很相似,都是基于特征图进行预测,但是
- RPN是基于锚框,针对预设的锚框进行预测,而FCOS是基于位置点的,直接预测每个特征图位置是否为物体中心,不需要预设锚框。
- RPN执行类别无关的对象分类,而FCOS和常见的单阶段检测器通常进行类别特定的物体分类,直接预测物体所属的类别
- RPN没有中心度回归,因为FCOS发布晚于Faster R-CNN,所以没有这个后期的优化技术
RPN像FCOS需要将中心点和GT框进行匹配那样才能计算损失,在后面有解释。
无论是 RPN 还是 FCOS,都依赖于特征图(p3, p4, p5)的网格结构,假设p3的特征图尺寸是 28 x 28,RPN则基于这 28 x 28个网格单元在特征图上的中心坐标来放置num_anchors个预定义好的锚框,所以最终会共有28 x 28 x num_anchors个锚框。
https://www.thinkautonomous.ai/blog/anchor-boxes/
class RPNPredictionNetwork(nn.Module):
def __init__(
self, in_channels: int, stem_channels: List[int], num_anchors: int = 3
):
super().__init__()
self.num_anchors = num_anchors
stem_rpn = []
prev_out = in_channels
for out_channels in stem_channels:
conv_rpn = nn.Conv2d(prev_out, out_channels, kernel_size=3, stride=1, padding=1)
nn.init.normal_(conv_rpn.weight.data, mean=0, std=0.01)
nn.init.constant_(conv_rpn.bias.data, 0)
stem_rpn.append(conv_rpn)
stem_rpn.append(nn.ReLU())
prev_out = out_channels
self.stem_rpn = nn.Sequential(*stem_rpn)
self.pred_obj = None # Objectness conv
self.pred_box = None # Box regression conv
self.pred_obj = nn.Conv2d(prev_out, num_anchors, kernel_size=3, stride=1, padding=1)
nn.init.normal_(self.pred_obj.weight.data, mean=0, std=0.01)
nn.init.constant_(self.pred_obj.bias.data, 0)
self.pred_box = nn.Conv2d(prev_out, 4 * num_anchors, kernel_size=3, stride=1, padding=1)
nn.init.normal_(self.pred_box.weight.data, mean=0, std=0.01)
nn.init.constant_(self.pred_box.bias.data, 0)
def forward(self, feats_per_fpn_level: TensorDict) -> List[TensorDict]:
object_logits = {}
boxreg_deltas = {}
for level, feature in feats_per_fpn_level.items():
object_logits[level] = self.pred_obj(self.stem_rpn(feature))
object_logits[level] = object_logits[level].permute(0, 2, 3, 1).reshape(object_logits[level].shape[0], -1)
boxreg_deltas[level] = self.pred_box(self.stem_rpn(feature))
boxreg_deltas[level] = boxreg_deltas[level].permute(0, 2, 3, 1).reshape(boxreg_deltas[level].shape[0], -1, 4)
return [object_logits, boxreg_deltas]For dummy input images with shape: torch.Size([2, 3, 224, 224])
Shape of p3 FPN features : torch.Size([2, 64, 28, 28])
Shape of p3 RPN objectness: torch.Size([2, 2352])
Shape of p3 RPN box deltas: torch.Size([2, 2352, 4])
Shape of p4 FPN features : torch.Size([2, 64, 14, 14])
Shape of p4 RPN objectness: torch.Size([2, 588])
Shape of p4 RPN box deltas: torch.Size([2, 588, 4])
Shape of p5 FPN features : torch.Size([2, 64, 7, 7])
Shape of p5 RPN objectness: torch.Size([2, 147])
Shape of p5 RPN box deltas: torch.Size([2, 147, 4])Anchor-based Training of RPN
如何训练RPN,使其能够为可能包含物体的锚框预测 高物体性 和 精确的边界框偏移量。 为了实现这个目标,我们需要为每个 RPN 的预测分配一个 目标 GT 框,以便进行监督训练。
- FCOS基于一个启发式的方法,将每个FPN特征图位置和一个GT框进行匹配(或标记为背景), 这个启发式方法是判断该位置是否 在任何 GT 框的内部。 即如果一个特征图位置落入某个 GT 框内,就将该位置与这个 GT 框关联起来,作为正样本进行训练。
- Faster R-CNN 的方法 (锚框): 与 FCOS 不同,Faster R-CNN 是 基于锚框 的。 它不是针对 “位置” 进行预测,而是 参考预定义的 “锚框” 进行预测。 并且,Faster R-CNN 基于 Intersection-over-Union (IoU) 重叠度,将每个锚框与一个 GT 框进行匹配 (如果 IoU 足够高)。 这意味着,如果一个锚框与某个 GT 框的重叠度很高,就将这个锚框与该 GT 框关联起来,作为正样本进行训练。
接下来和FCOS的流程类似
- 锚框生成 (Anchor generation): 为 FPN 特征图中的每个位置生成一组锚框。 这是第一个关键步骤,我们需要先创建出我们预测的基础 - 锚框。
- 锚框与 GT 框匹配 (Anchor to GT matching): 基于 IoU 重叠度,将生成的锚框与 GT 框进行匹配。 确定哪些锚框是 “正样本” (负责预测物体),哪些是 “负样本” (背景)。
- 边界框偏移量的格式 (Format of box deltas): 实现转换函数,用于从 GT 框获取 “边界框偏移量” (box deltas),以便作为模型训练的监督信号。 并且,还需要实现应用偏移量到锚框,从而得到最终的提议框 (用于第二阶段)。 简单来说,我们需要定义如何将锚框 “调整” 成 GT 框的数学公式,以及反过来如何用模型预测的偏移量去调整锚框。
Anchor Generation
在FCOS中已经实现了创建网格并获取中心点坐标,现在就需要以这些中心点坐标为基础创建多个锚框
RPN 定义了 正方形锚框,其大小为 scale * stride。 其中 stride 是 FPN 级别的步长 (例如,P5 级别的步长为 32),scale 是一个超参数 (可以调整锚框大小的系数)。 例如,对于 P5 级别 (stride = 32),如果 scale = 2,则锚框的大小将为 (64x64) 像素。
除了正方形锚框,RPN 还考虑了 不同宽高比 (aspect ratios) 的锚框,所以除了正方形,还会有长方形、扁长的锚框。
根据中心点怎么生成锚框?
- 首先确定锚框面积,无论在单个层级的锚框的宽和高变化,面积是固定的,但是不同层级的锚框大小不同 =>
- 在单个层级锚框的宽随着aspect_ratios比例不断变化 :
- 锚框的ltrb坐标为:
def generate_fpn_anchors(
locations_per_fpn_level: TensorDict,
strides_per_fpn_level: Dict[str, int],
stride_scale: int,
aspect_ratios: List[float] = [0.5, 1.0, 2.0],
):
anchors_per_fpn_level = {
level_name: None for level_name, _ in locations_per_fpn_level.items()
}
for level_name, locations in locations_per_fpn_level.items():
level_stride = strides_per_fpn_level[level_name]
# List of `A = len(aspect_ratios)` anchor boxes.
area = (level_stride * stride_scale) ** 2 # 锚框面积是固定的 `(this value) * (FPN level stride)`
anchor_boxes = []
for aspect_ratio in aspect_ratios:
# Replace "pass" statement with your code
width = math.sqrt(area / aspect_ratio)
height = area / width
anchor_box = torch.empty(locations.shape[0], 4).to(locations) # (H*W, 4)
anchor_box[:, 0] = locations[:, 0] - width / 2 # x1 = xc - width / 2
anchor_box[:, 1] = locations[:, 1] - height / 2 # y1 = yc - height / 2
anchor_box[:, 2] = locations[:, 0] + width / 2 # x2 = xc + width / 2
anchor_box[:, 3] = locations[:, 1] + height / 2 # y2 = yc + height / 2
anchor_boxes.append(anchor_box)
anchor_boxes = torch.stack(anchor_boxes)
# Bring `H * W` first and collapse those dimensions.
anchor_boxes = anchor_boxes.permute(1, 0, 2).contiguous().view(-1, 4)
anchors_per_fpn_level[level_name] = anchor_boxes
return anchors_per_fpn_levelMatching anchor boxes with GT boxes
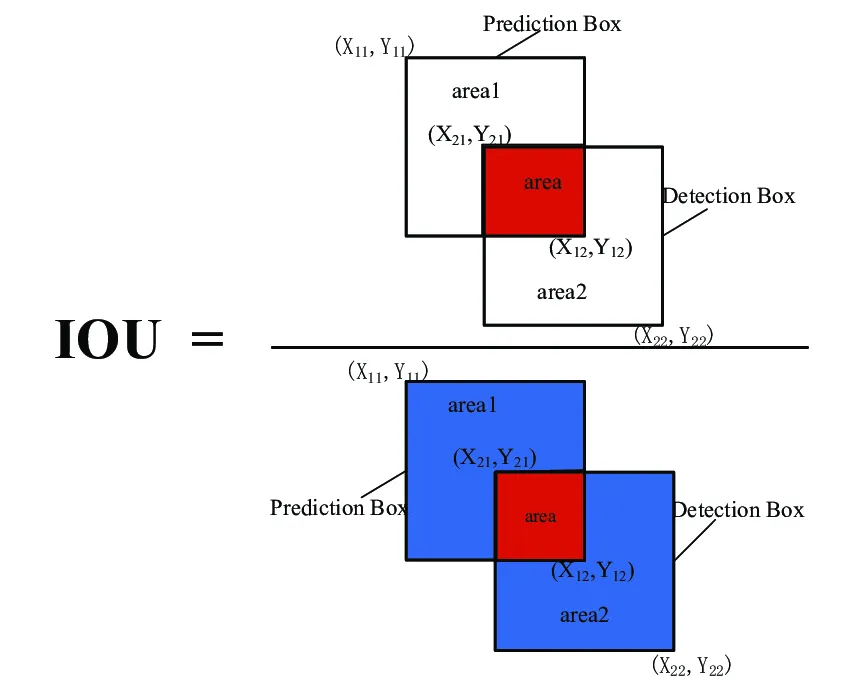
Rule如果锚框 与 GT 框 的 IoU 重叠度高于 0.6,则将锚框 与 GT框匹配。 如果一个锚框与多个 GT 框的 IoU 都高于 0.6,则将该锚框与 IoU 最高 的 GT 框匹配。注意,一个 GT 框可以与多个锚框 匹配为正样本。
这里使用0.6作为阈值,增加了正样本的数量方便模型训练
IoU = 交集面积 / 剩余区域面积
def iou(boxes1: torch.Tensor, boxes2: torch.Tensor) -> torch.Tensor:
M, N = boxes1.shape[0], boxes2.shape[0]
iou = torch.empty(size=(M, N)).to(boxes1)
x1_boxes1 = boxes1[:, 0].unsqueeze(dim=-1).repeat(1, N)
y1_boxes1 = boxes1[:, 1].unsqueeze(dim=-1).repeat(1, N)
x2_boxes1 = boxes1[:, 2].unsqueeze(dim=-1).repeat(1, N)
y2_boxes1 = boxes1[:, 3].unsqueeze(dim=-1).repeat(1, N)
area_boxes1 = torch.mul(x2_boxes1 - x1_boxes1, y2_boxes1 - y1_boxes1)
x1_boxes2 = boxes2[:, 0].repeat(M, 1)
y1_boxes2 = boxes2[:, 1].repeat(M, 1)
x2_boxes2 = boxes2[:, 2].repeat(M, 1)
y2_boxes2 = boxes2[:, 3].repeat(M, 1)
area_boxes2 = torch.mul(x2_boxes2 - x1_boxes2, y2_boxes2 - y1_boxes2)
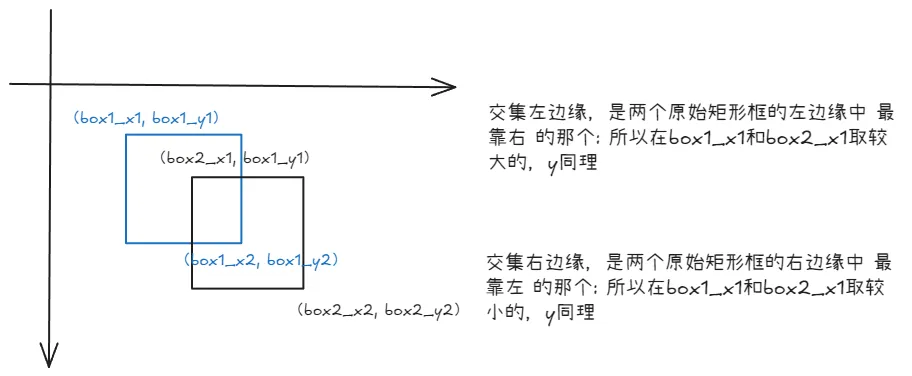
x1_inner = torch.clamp(x1_boxes2, min=x1_boxes1)
y1_inner = torch.clamp(y1_boxes2, min=y1_boxes1)
x2_inner = torch.clamp(x2_boxes1, max=x2_boxes2)
y2_inner = torch.clamp(y2_boxes1, max=y2_boxes2)
W_inner = torch.clamp(x2_inner - x1_inner, min=0.0)
H_inner = torch.clamp(y2_inner - y1_inner, min=0.0)
area_inner = H_inner * W_inner
union_area = area_boxes1 + area_boxes2 - area_inner
iou = area_inner / union_area
return iou将锚框和GT进行匹配
def rcnn_match_anchors_to_gt(
anchor_boxes: torch.Tensor,
gt_boxes: torch.Tensor,
iou_thresholds: Tuple[float, float],
) -> TensorDict:
# Filter empty GT boxes:
gt_boxes = gt_boxes[gt_boxes[:, 4] != -1]
# If no GT boxes are available, match all anchors to background and return.
if len(gt_boxes) == 0:
fake_boxes = torch.zeros_like(anchor_boxes) - 1
fake_class = torch.zeros_like(anchor_boxes[:, [0]]) - 1
return torch.cat([fake_boxes, fake_class], dim=1)
# Match matrix => pairwise IoU of anchors (rows) and GT boxes (columns).
# STUDENTS: This matching depends on your IoU implementation.
match_matrix = iou(anchor_boxes, gt_boxes[:, :4])
# Find matched ground-truth instance per anchor:
match_quality, matched_idxs = match_matrix.max(dim=1)
matched_gt_boxes = gt_boxes[matched_idxs]
# Set boxes with low IoU threshold to background (-1).
matched_gt_boxes[match_quality <= iou_thresholds[0]] = -1
# Set remaining boxes to neutral (-1e8).
neutral_idxs = (match_quality > iou_thresholds[0]) & (
match_quality < iou_thresholds[1]
)
matched_gt_boxes[neutral_idxs, :] = -1e8
return matched_gt_boxesGT Targets for box regression
回顾在FCOS中我们将中心点和GT框相匹配之后计算了中心点到四个边框的距离并除以stride,在Faster-RCNN中也需要进行类似的计算
fcos_get_deltas_from_locations: 接收中心点坐标和GT boxes,返回到四个边框的距离deltas用作训练监督
fcos_apply_deltas_to_locations: 接收预测的deltas和位置,返回预测的边框,在模型推理时使用
在Faster RCNN中是以下功能:
rcnn_get_deltas_from_anchors: Accepts anchor boxes and GT boxes, and returns deltas. Required for training supervision.rcnn_apply_deltas_to_anchors: Accepts predicted deltas and anchor boxes, and returns predicted boxes. Required during inference.
在 FCOS 中,模型在特征图的每个位置直接预测四个值,分别代表从该位置到边界框的 左、右、上、下 边界的距离,这种方式非常直观,因为直接预测距离,一加一减就能确定一个边界框。
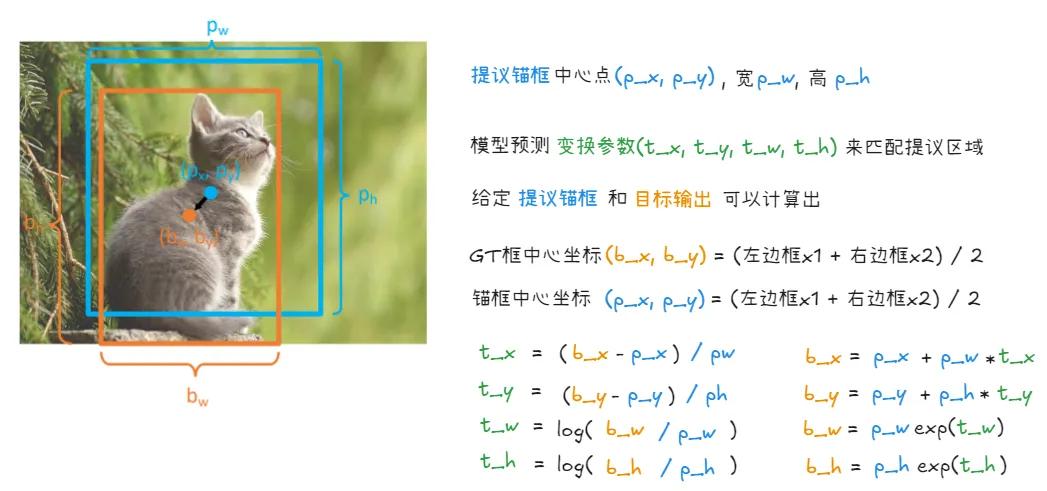
在 Faster R-CNN 中,模型并不直接预测最终的边界框坐标,而是预测一组 变换参数 (deltas) (tx, ty, tw, th)。 这些变换参数的作用是 将预先定义的锚框 (proposals) 调整(变换)到更接近 真实目标框 (GT boxes) 的位置和大小。
https://lilianweng.github.io/posts/2017-12-31-object-recognition-part-3/
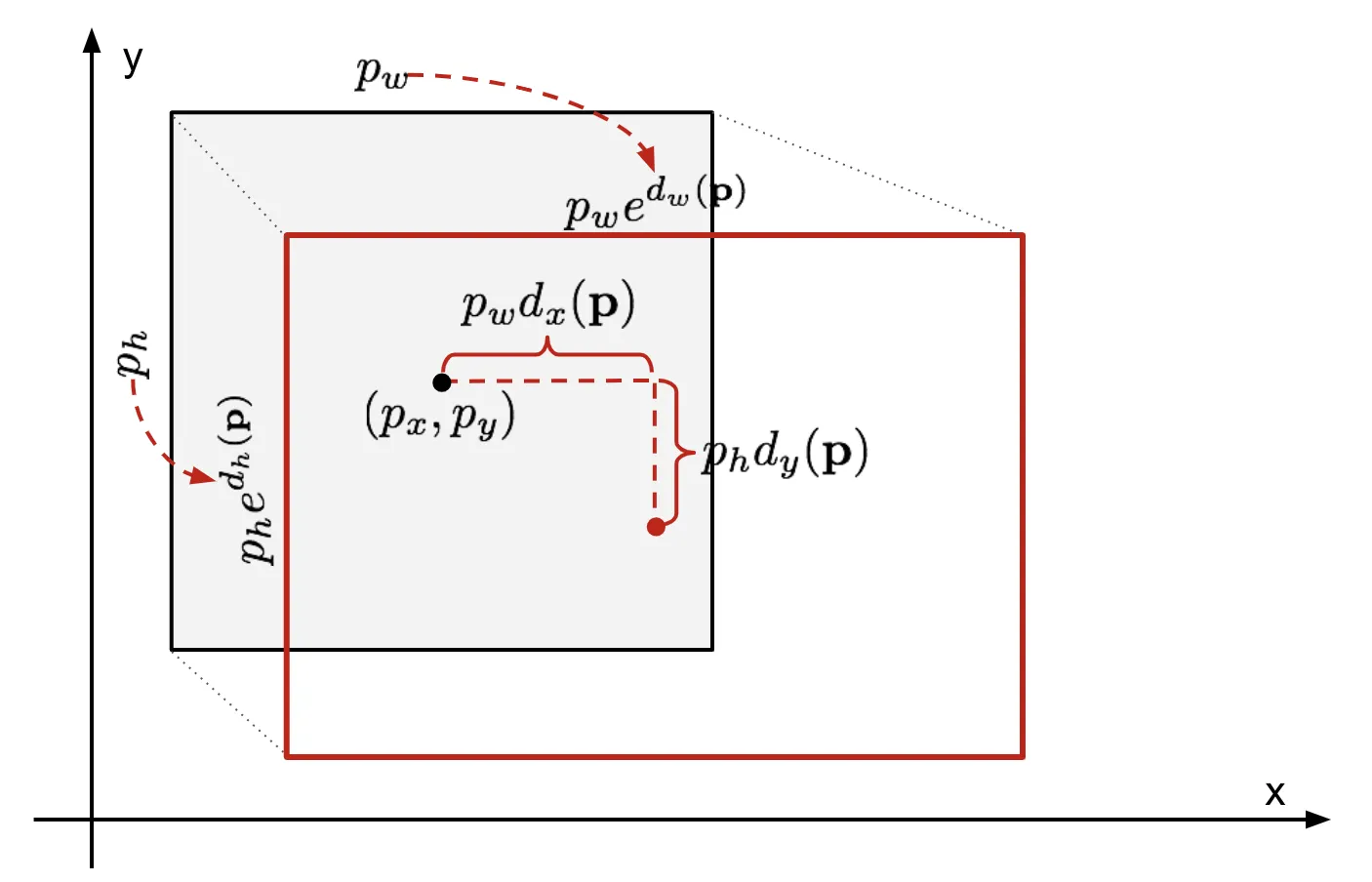
锚框作为基准 (Reference): Faster R-CNN 的核心思想是基于预定义的锚框进行预测。 锚框本身就提供了一个 初始的边界框估计。模型需要学习的是 如何在锚框的基础上进行微调,而不是像 FCOS 那样从零开始预测边界框。 (x, y, w, h) 参数化方式更适合这种微调的思想。
rcnn_get_deltas_from_anchors:
def rcnn_get_deltas_from_anchors(
anchors: torch.Tensor, gt_boxes: torch.Tensor
) -> torch.Tensor:
# (N, 4)
deltas = torch.empty_like(anchors)
# 计算GT框的中心点坐标和宽高
bx = (gt_boxes[:, 0] + gt_boxes[:, 2]) / 2 # GT框中心点 x 坐标, 公式为(x1 + x2) / 2
by = (gt_boxes[:, 1] + gt_boxes[:, 3]) / 2 # GT框中心点 y 坐标, 公式为(y1 + y2) / 2
bw = gt_boxes[:, 2] - gt_boxes[:, 0] # GT框宽度 (x2 - x1)
bh = gt_boxes[:, 3] - gt_boxes[:, 1] # GT框高度 (y2 - y1)
# 计算锚框中心点坐标和宽高
px = (anchors[:, 0] + anchors[:, 2]) / 2 # (x1 + x2) / 2
py = (anchors[:, 1] + anchors[:, 3]) / 2 # (y1 + y2) / 2
pw = anchors[:, 2] - anchors[:, 0] # 锚框宽高
ph = anchors[:, 3] - anchors[:, 1]
# 计算框回归偏移量
deltas[:, 0] = (bx - px) / pw # 中心点坐标 x 偏移量 - GT 框中心点 bx 坐标相对于锚框中心点 px 坐标的归一化偏移量,除以锚框宽度进行归一化
deltas[:, 1] = (by - py) / ph # 中心点坐标 y 偏移量: (by - py) / ph
deltas[:, 2] = torch.log(bw / pw) # 宽度缩放因子: log(bw / pw) 表示 GT 框宽度相对于锚框宽度的 对数空间缩放因子, 使用对数空间可以使宽度和高度的缩放更加稳定
deltas[:, 3] = torch.log(bh / ph)
deltas[gt_boxes[:, :4].sum(dim=1) == -4] = -1e8
return deltasfcos_apply_deltas_to_locations:
def rcnn_apply_deltas_to_anchors(
deltas: torch.Tensor, anchors: torch.Tensor
) -> torch.Tensor:
scale_clamp = math.log(224 / 8)
deltas[:, 2] = torch.clamp(deltas[:, 2], max=scale_clamp)
deltas[:, 3] = torch.clamp(deltas[:, 3], max=scale_clamp)
output_boxes = torch.empty_like(deltas)
px = (anchors[:, 0] + anchors[:, 2]) / 2 # 锚框中心点 x 坐标 (px = (x1 + x2) / 2)
py = (anchors[:, 1] + anchors[:, 3]) / 2 # 锚框中心点 y 坐标 (py = (y1 + y2) / 2)
pw = anchors[:, 2] - anchors[:, 0] # 锚框高度和宽度
ph = anchors[:, 3] - anchors[:, 1]
bx = px + torch.mul(pw, deltas[:, 0]) # bx = px + pw * dx: 预测框中心点 x 坐标
by = py + torch.mul(ph, deltas[:, 1]) # by = py + ph * dy: 预测框中心点 y 坐标
bw = torch.mul(pw, deltas[:, 2].exp()) # bw = pw * exp(dw): 预测框宽度 (指数变换还原)
bh = torch.mul(ph, deltas[:, 3].exp())
output_boxes[:, 0] = bx - bw / 2 # x1 = bx - bw / 2: 预测框左上角 x 坐标
output_boxes[:, 1] = by - bh / 2 # y1 = by - bh / 2: 预测框左上角 y 坐标
output_boxes[:, 2] = bx + bw / 2 # x2 = bx + bw / 2: 预测框右下角 x 坐标
output_boxes[:, 3] = by + bh / 2
output_boxes[deltas[:, 0] == -1e8] = -1e8 # 将 deltas "背景" 的对应的 output_boxes 也设置为 -1e8
return output_boxesPull it all together
回顾整个流程:首先和FCOS一样都是从特征金字塔FPN中提取不同层级的特征,统一输出通道,然后在经过几层卷积,和FCOS接下来做出三种预测:中心度预测,delta值预测即框预测,类别预测不同的是,FasterRCNN仅做出两种预测:物体性预测:判断框内有物体的可能性是多大,和delta值预测,这里和FCOS不同的是FCOS是预测ltrb距离四个边框的距离,而FasterRCNN是xywh,是预测锚框基于生成的锚框的变化,FCOS和Faster都是在特征图中心点上进行计算,假设p3层级是28x28,那么就有28x28个中心点即位置,FCOS通过两种匹配规则来确定中心点和哪些GT框相匹配,然后和这些匹配的框计算delta值和中心度,而FasterRCNN直接根据不同层级生成不同大小的锚框,生成锚框遵循在统一层级面积大小不变但是宽度随着比例变化,假设在每个中心点生成3个锚框,这些锚框还按照三种比例缩放所以共计有28x28x9个锚框,然后把这些锚框按照IoU的匹配规则和GT框进行匹配,然后计算锚框和GT框之间的deltas值,这里是, , ,
class RPN(nn.Module):
def __init__(
self,
fpn_channels: int,
stem_channels: List[int],
batch_size_per_image: int,
anchor_stride_scale: int = 8,
anchor_aspect_ratios: List[int] = [0.5, 1.0, 2.0],
anchor_iou_thresholds: Tuple[int, int] = (0.3, 0.6),
nms_thresh: float = 0.7,
pre_nms_topk: int = 400,
post_nms_topk: int = 100,
):
super().__init__()
self.pred_net = RPNPredictionNetwork(
fpn_channels, stem_channels, num_anchors=len(anchor_aspect_ratios)
)
# Record all input arguments:
self.batch_size_per_image = batch_size_per_image
self.anchor_stride_scale = anchor_stride_scale
self.anchor_aspect_ratios = anchor_aspect_ratios
self.anchor_iou_thresholds = anchor_iou_thresholds
self.nms_thresh = nms_thresh
self.pre_nms_topk = pre_nms_topk
self.post_nms_topk = post_nms_topk
def forward(
self,
feats_per_fpn_level: TensorDict,
strides_per_fpn_level: TensorDict,
gt_boxes: Optional[torch.Tensor] = None,
):
# Get batch size from FPN feats:
num_images = feats_per_fpn_level["p3"].shape[0]
pred_obj_logits, pred_boxreg_deltas, anchors_per_fpn_level = (
None,
None,
None,
)
# {level : (B, HWA) & (B, HWA, 4)}
pred_obj_logits, pred_boxreg_deltas = self.pred_net(feats_per_fpn_level)
fpn_feats_shapes = {level_name: feat.shape
for level_name, feat in feats_per_fpn_level.items()}
# {level : (B, HW, 2)}
locations_per_fpn_level = get_fpn_location_coords(fpn_feats_shapes, strides_per_fpn_level,
device=feats_per_fpn_level["p3"].device)
# {level : (B, HWA, 4)}
anchors_per_fpn_level = generate_fpn_anchors(locations_per_fpn_level,
strides_per_fpn_level,
self.anchor_stride_scale,
self.anchor_aspect_ratios)
# "loss_rpn_box" (training only), "loss_rpn_obj" (training only)
output_dict = {}
if not self.training:
return output_dict
for batch in range(gt_boxes.shape[0]):
matched_gt_boxes_batch = rcnn_match_anchors_to_gt(anchor_boxes, gt_boxes[batch],
self.anchor_iou_thresholds)
matched_gt_boxes.append(matched_gt_boxes_batch)
然后对于物体性预测通常使用BCE loss(Binary Cross-Entropy Loss),边界框回归使用L1 Loss进行优化, 这里在计算损失时也有不同,对于FCOS的三种预测,类别标签的预测是预测的pred_cls_logits和将中心点对应的GT框的类别标签转换成one-hot向量并去掉背景类别应用focal损失,而框预测损失是预测的pred_boxreg_deltas和匹配的GT框的deltas进行计算损失(需要将背景框的损失设为0),中心度预测是预测的中心度和对应的GT框的中心度进行损失计算,而Faster R-CNN在计算损失之前还要进行样本采样来平衡正负样本
样本采样
之前说过在锚框和GT框做匹配的时候我们通过计算IoU来确定哪些锚框是正样本,哪些是负样本,和正样本锚框负责预测哪个GT框的问题
而样本采样是解决正负样本不均衡的问题,即使经过了匹配依然存在以下问题:
- 正负样本极度不均衡:在所有生成的锚框中,正样本(与GT匹配的锚框)的数量通常远少于负样本(背景锚框),如果不加以处理,模型很容易被大量的负样本主导,导致倾向于预测为背景
- 计算量过大:如果锚框数量过大,使用全部的锚框来计算损失并BP,计算量太大了
样本采样是在匹配之后进行,对匹配结果进一步筛选,从所有已标记的锚框中,有策略的选择一部分锚框。代码返回前景和背景锚框的索引
def sample_rpn_training(
gt_boxes: torch.Tensor, num_samples: int, fg_fraction: float
):
"""
Return `num_samples` (or fewer, if not enough found) random pairs of anchors
and GT boxes without exceeding `fg_fraction * num_samples` positives, and
then try to fill the remaining slots with background anchors. We will ignore
"neutral" anchors in this sampling as they are not used for training.
Args:
gt_boxes: Tensor of shape `(N, 5)` giving GT box co-ordinates that are
already matched with some anchor boxes (with GT class label at last
dimension). Label -1 means background and -1e8 means meutral.
num_samples: Total anchor-GT pairs with label >= -1 to return.
fg_fraction: The number of subsampled labels with values >= 0 is
`min(num_foreground, int(fg_fraction * num_samples))`. In other
words, if there are not enough fg, the sample is filled with
(duplicate) bg.
Returns:
fg_idx, bg_idx (Tensor):
1D vector of indices. The total length of both is `num_samples` or
fewer. Use these to index anchors, GT boxes, and model predictions.
"""
foreground = (gt_boxes[:, 4] >= 0).nonzero().squeeze(1)
background = (gt_boxes[:, 4] == -1).nonzero().squeeze(1)
# Protect against not enough foreground examples.
num_fg = min(int(num_samples * fg_fraction), foreground.numel())
num_bg = num_samples - num_fg
# Randomly select positive and negative examples.
perm1 = torch.randperm(foreground.numel(), device=foreground.device)[:num_fg]
perm2 = torch.randperm(background.numel(), device=background.device)[:num_bg]
fg_idx = foreground[perm1]
bg_idx = background[perm2]
return fg_idx, bg_idx通过采样获得前景和背景的索引,同时将前景设为1,背景设为0即为物体分类性损失的GT目标,和被采样的生成锚框的物体性预测输出进行二元交叉熵损失,然后还需要确定被采样的生成锚框的坐标——>被采样的生成锚框对应的gt框——>被采样的生成锚框对应真实锚框的detla值和被采样的预测delta值进行l1-loss
loss_obj, loss_box = None, None
# Step 1: Sample a few anchor boxes for training
fg_idx, bg_idx = sample_rpn_training(matched_gt_boxes,
self.batch_size_per_image * num_images, fg_fraction=0.5)
# 包含所有采样到的锚框的索引
idx = torch.cat((fg_idx, bg_idx), 0)
# 将前景设置为1
sampled_gt_fg = torch.ones_like(fg_idx)
# 背景设置为0
sampled_gt_bg = torch.zeros_like(bg_idx)
# 包含所有采样锚框GT物体性标签(前景为1,背景为0)作为物体分类性损失的GT目标
sampled_gt_objectness = torch.cat((sampled_gt_fg, sampled_gt_bg), 0).float()
# Step 2: Compute GT targets for box regression
# 确定被采样的生成锚框的坐标
sampled_anchor_boxes = anchor_boxes[idx]
# 确定被采样的生成锚框对应的GT框信息
sampled_matched_gt_boxes = matched_gt_boxes[idx]
# 被采样的生成锚框的物体性预测输出
sampled_pred_obj_logits = pred_obj_logits[idx]
# 被采样的生成锚框的delta值
sampled_pred_boxreg_deltas = pred_boxreg_deltas[idx]
# 被采样的生成锚框对应真实锚框的delta值
sampled_gt_deltas = rcnn_get_deltas_from_anchors(sampled_anchor_boxes,
sampled_matched_gt_boxes)
# Step 3: Calculate objectness and box reg losses per sampled anchor
loss_box = F.l1_loss(sampled_pred_boxreg_deltas, sampled_gt_deltas, reduction="none")
loss_box[sampled_gt_deltas == -1e8] *= 0
loss_obj = F.binary_cross_entropy_with_logits(sampled_pred_obj_logits,
sampled_gt_objectness, reduction="none")Faster R-CNN
上面实现的rpn是FasterRCNN的组件之一,目的是生成高质量的候选目标区域(Region Proposals),在整个FasterRCNN流程中,RPN先通过卷积在特征图上滑动窗口,预测物体性(objectness)分数和边界框回归偏移量(box regression deltas)。根据这些预测,RPN可以筛选和调整预先设定的锚框,从而生成一系列可能包含物体的候选区域(proposals)
如标题 Faster R-CNN是一个two-stage的目标检测器,核心思想是将检测任务分为两个阶段:
- Region Proposal Network(RPN) 阶段 (第一阶段):快速生成候选的目标区域,RPN负责在特征图上预测可能包含物体的区域,相当于初筛过程
- RoI Head阶段(第二阶段):对RPN生成的候选区域进行更精细的分类和边界框回归(本代码仅进行类别分类不进行边界框回归)
ROI(Region of Interests)
ROI是指在原始图像上的有第一阶段(RPN)预测出可能包含目标的候选区域,例如原始图像是224x224,RPN可能预测出一个ROI的边界框为(50.2, 120.7, 180.9, 200.1), 表示在原始图像上的的一个矩形区域。
将原始图像的 RoI 映射到特征图:
特征图的生成: 假设输入图像为(3, 224, 224),经过卷积神经网络(CNN)的处理,会生成一系列的特征图,例如 (64, 28, 28)、(160, 14, 14)、(400, 7, 7)。这些特征图是原始图像的抽象表示,并且由于卷积和池化等操作,它们的尺寸通常会比原始图像小。
空间比例(Spatial Scale): 特征图上的一个像素对应于原始图像上的一个区域。这个对应关系由网络的下采样率决定。例如,如果从 224x224 到 28x28,下采样率是 8 (224/28 = 8)。这意味着特征图上的一个像素“看到”了原始图像上一个 8x8 的区域。
映射过程: 为了在特征图上找到与原始图像上的 RoI 相对应的区域,我们需要将 RoI 的坐标从原始图像的尺寸映射到特征图的尺寸。这个映射通常通过将 RoI 的坐标除以网络的总下采样率来实现。
- 假设原始图像ROI是(50.2, 120.7, 180.9, 200.1) - 特征图 (64, 28, 28) 的总下采样率是 8 - 映射到特征图上的 RoI 坐标将为:50.2 / 8 = 6.275,120.7 / 8 = 15.0875,180.9 / 8 = 22.6125,200.1 / 8 = 25.0125
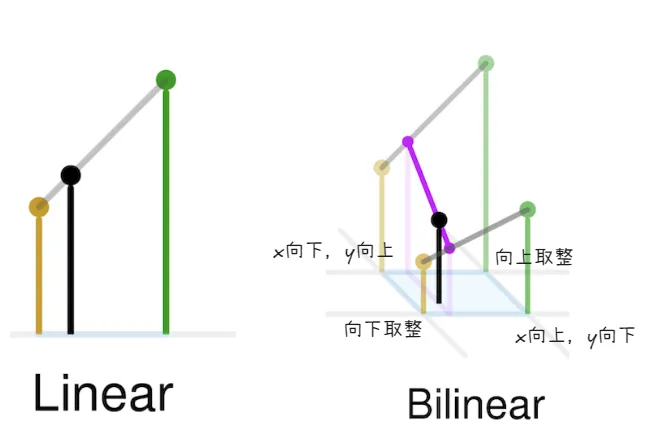
双线性插值是进行在映射后的特征图坐标所定义的区域内,用于在非整数像素位置上获取特征值
假设有两个不同的映射后的ROI:
- ROI 1: (6, 15, 22, 25) - 大小约为 16x10
- ROI 2: (8, 17, 12, 21) - 大小约为 4x4 对于这种最终得到的采样点数量和分布不同,难以得到统一的
7x7输出
ROI Align 通过将映射后的ROI划分为固定数量的子区域,假设目标输出大小是7x7,那么就将映射后的ROI区域(无论大小)均匀划分为7x7个小矩形子区域 然后对每个矩形子区域进行双线性插值(对采样点周围四个最近的整数像素点的特征值进行加权平均),同时为了能够保证采样点位置的精确信息,需要根据采样点到周围四个整数像素点的距离进行加权平均,距离越近,权重越大。
综合下来的流程是:输入图片经过特征金字塔提取不同层级的特征,统一通道数
feats_per_fpn_level = self.backbone(images)后进入RPN预测,生成锚框并预测可能包含物体的区域,
output_dict = self.rpn(
feats_per_fpn_level, self.backbone.fpn_strides, gt_boxes
)
proposals_per_image = output_dict["proposals"]然后经过RoI_align把特征图裁剪成(roi_size, roi_size)大小
for level_name in feats_per_fpn_level.keys():
level_feats = feats_per_fpn_level[level_name]
level_props = proposals_per_fpn_level[level_name]
level_stride = self.backbone.fpn_strides[level_name]
roi_feats = torchvision.ops.roi_align(level_feats, level_props,
self.roi_size, spatial_scale=1/level_stride, aligned=True)
roi_feats_per_fpn_level[level_name] = roi_feats最后预测输出类别
pred_cls_logits = self.cls_pred(roi_feats)在训练时将候选框(proposals)匹配到GT框
for _idx in range(len(gt_boxes)):
proposals_per_fpn_level_per_image = {
level_name: prop[_idx]
for level_name, prop in proposals_per_fpn_level.items()
}
proposals_per_image = self._cat_across_fpn_levels(
proposals_per_fpn_level_per_image, dim=0
)
gt_boxes_per_image = gt_boxes[_idx]
########################################################################
matched_gt_boxes_per_image = rcnn_match_anchors_to_gt(proposals_per_image,
gt_boxes_per_image, [0.5, 0.5])
matched_gt_boxes.append(matched_gt_boxes_per_image)计算交叉熵损失
# Step 1: Sample a few RPN proposals
fg_idx, bg_idx = sample_rpn_training(matched_gt_boxes,
self.batch_size_per_image * num_images, fg_fraction=0.25)
idx = torch.cat((fg_idx, bg_idx), 0)
# Step 2: Get GT class labels, and corresponding logits
matched_gt_cls = (matched_gt_boxes[idx, 4] + 1).to(dtype=int)
pred_cls_logits = pred_cls_logits[idx]
# Step 3:
loss_cls = F.cross_entropy(pred_cls_logits, matched_gt_cls)